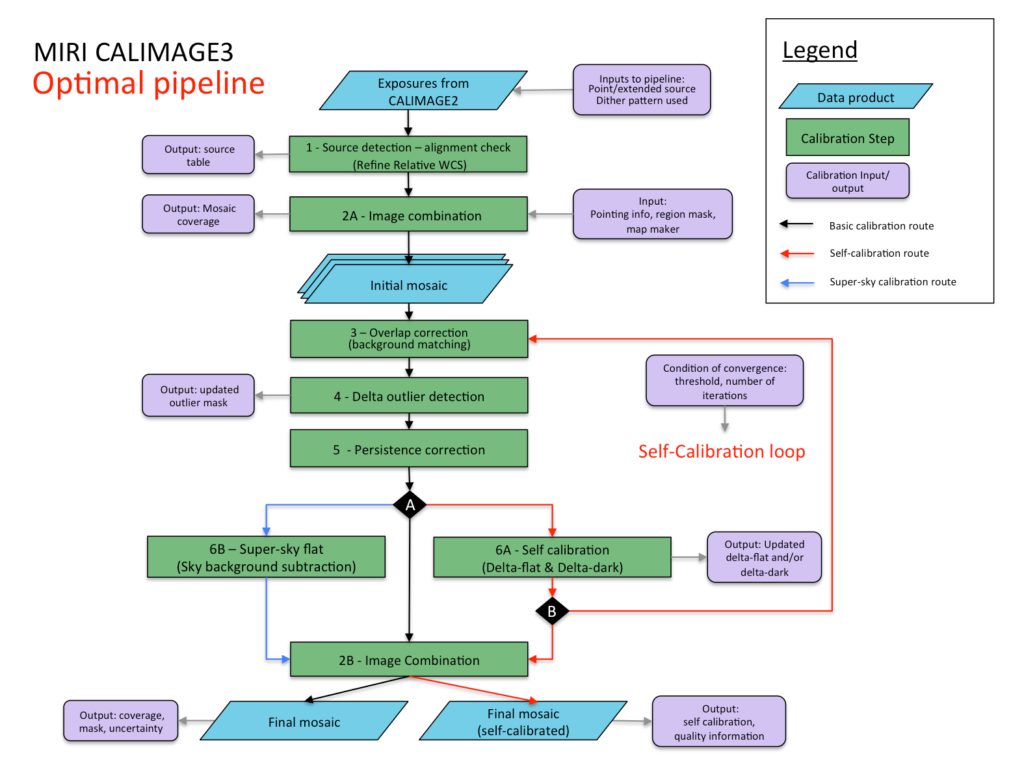
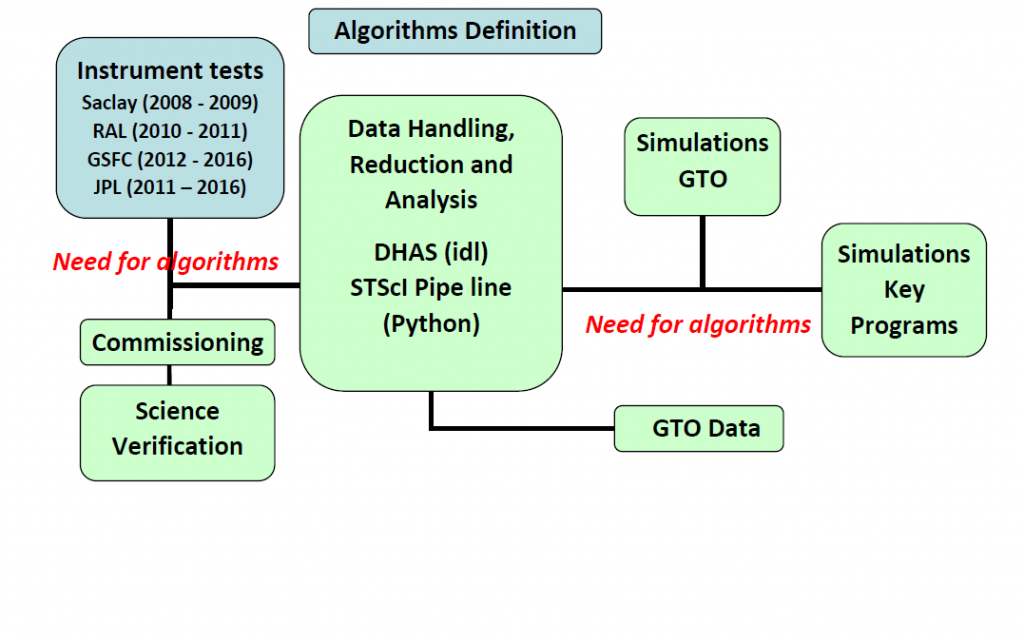
Data processing tools for MIRI data reduction are being developed by STScI on the basis of algorithms provided by the Performance Tests and Calibration Team (PTCT) and by individual institutions belonging to the European Consortium (EC). Inside the EC MICE members were heavily involved in the imager pipeline working group (IPWG), which task was to define the overall architecture and to produce those algorithms to be coded in Python and included in the general pipeline built at STScI.